人とロボットのコミュニケーション

人体通信技術のロボットへの導入は、世界的にも注目されており、2015年3月11日~14日に、韓国の大田広域市で開催された「第5回 ETRI Korea / Japan HBC Conference 9」 」でも熱心にディスカッションが行われた。
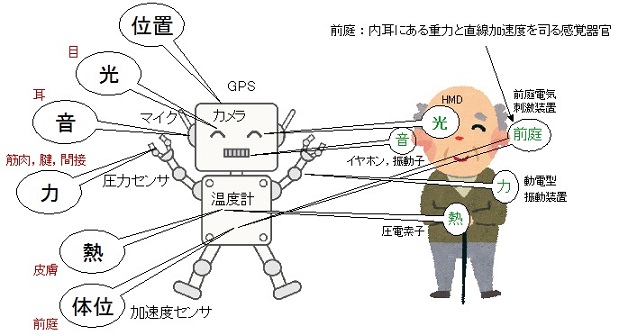
人体通信は、人と機械のコミュニケーションに適した近距離無線通信であるので、右図に示す人体に取り付けたセンサのからの情報を、人の生活を支援するロボットに伝達するのに適したデバイスである。
人の五感センサは、すでに電子部品として購入できるものが多い。センサの出力信号に遅延があると、人が行動することを妨げてしまうため、アナログ形態の信号を伝送することが良いかもしれない。人体通信はアナログ変調によるリアルタイム通信も可能である。
ロボットの関節問題
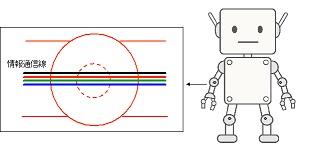
ロボットの関節は情報通信線がたくさん必要になります。そのため、関節には電力線や多くの信号線がありますが、関節の曲げ伸ばしを繰り返しますと、電線の金属疲労による断線は、ロボットにとっての大きな問題になります。
この問題は建機なども関節のように曲げ伸ばしを繰り返しますので、同様な問題が存在します。
関節に人体通信技術を導入
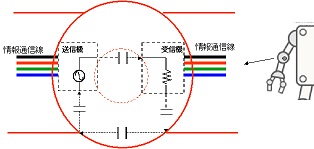
ロボットの関節は雑音を出しますので、弊社は、情報通信には耐雑音性の強いスペクトル拡散方式による人体通信技術を採用しております。
電力伝送も、小電力なら人体通信+レクテナの技術で、大電力なら電磁誘導の技術でワイヤレス化が可能です。
ロボット稼動部の通信や電力伝送もワイヤレス化を行い、信頼性の高いロボットを実現しましょう。
ソーラーパネルによる人体通信モジュールへの電源供給

電力伝送が不要な場合、人体通信モジュールは消費電力が小さいので、ロボットのボディーに貼り付けたソーラーパネルを電源として用いることができます。
人体通信の試作はオモチャを改造して行うことが多いのですが、ロボットのオモチャは種類も多く、安価に購入できますので、楽しみながら試作し実験をしています。
現在、関節に適した電極を模索しています。大きなロボットのオモチャを用い、関節を動かしながら実験をしてみたいと考えています。
今後の超高齢化社会に求められる生活支援(医療・福祉・介護・リハビリ)ロボット技術

市場拡大が期待される生活支援ロボットの実用化・事業化は何故遅れているのか?克服すべき点とは? 今後の開発・ビジネス展開に向け、ハードウェア・ソフトウェア技術だけでなく、各種ロボット開発事例から市場動向、規制・安全性、特許など、必要となる情報を総合的に網羅した、指針となる書籍です。 (情報機構のホームページより転載)
第4章 第10項 「人体通信技術」 / 根日屋 英之 執筆
出版社名 :情報機構
ISBNコード : 978-4-86502-096-0
価格 : 64,000円 (税抜)